[라즈베리파이] Pupper 시작해서 Mini Pupper로 마무리 - 밀린 숙제하기
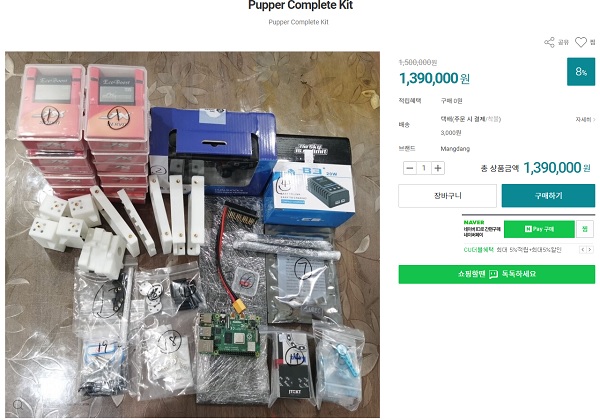
평소 4족 로봇에 관심이 많아 스텐포드에서 제작된 4족 로봇 Pupper를 동영상 보고 관련 Pupper Complete Kit를 구매 업체에서 판매하고 있어 관련 부품과 3D출력을 준비것도 큰일 이라서 편하게 도전 해보자 구매 하게 되었다.
작년에 구매 한 조립 KIT를 밀린 숙제하는 마음으로 조립 후 관련 S/W 포팅 등 기본 동작 수준 정도 진행 하였다.
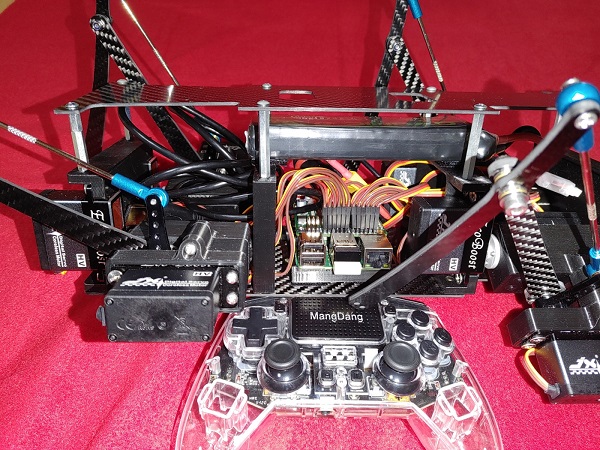
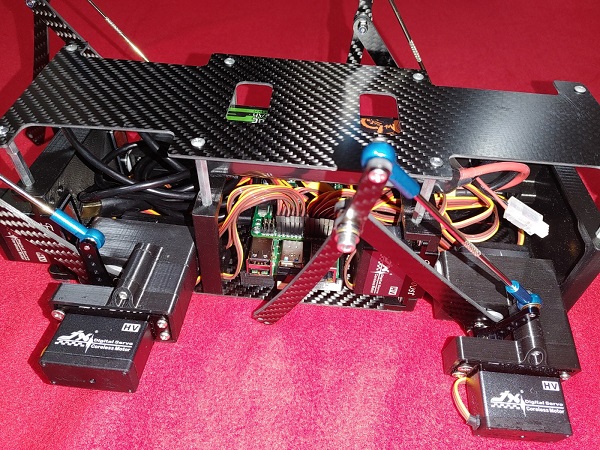
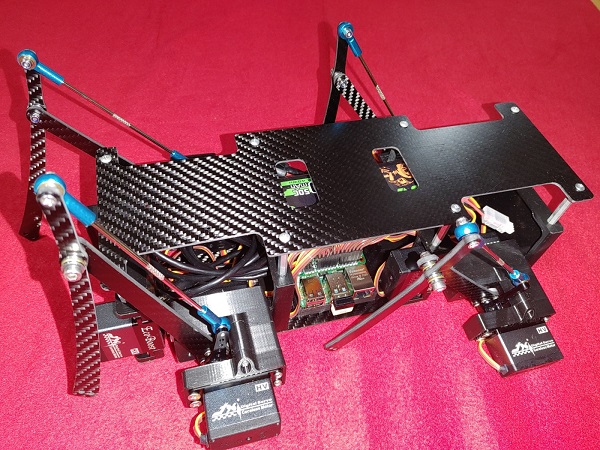
Pupper프레임 과 다리는 카본 제작되었으며, 배터리 내부 장착을 위하여 샷시 지지대를 이용하여 높이를 쌀짝 올림, 기본 조정은 게임 (PS4) 패드 블루트스 연동하여 조작
사용된 서버 모터 가격(12개)과 라즈베리 파이등 감안 하면 합리적 가격이지 않을까 생각되나, 취미 생활로 즐기기에는 부담 스럽다. (와이프 눈치 않보고 할수 잇는 누군가의 지원이 필요하다)
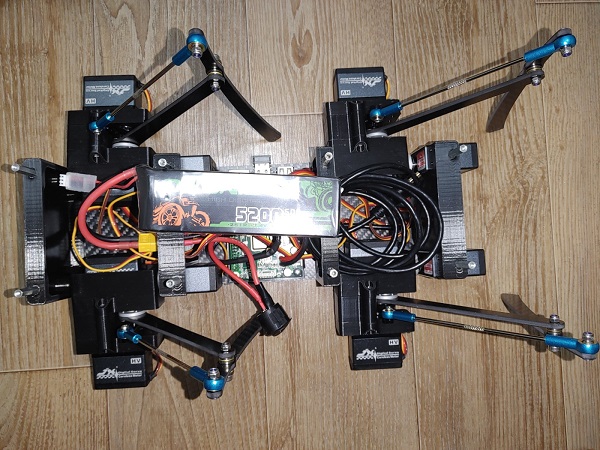
완성된 Pupper 라즈베리 파이 HDMI (모니터 연결) 무선 마우스, 키보드 단자 장착 후 배터리 팩을 위쪽에 배치 시키킨 후 프레임을 살짝 올려서 조립 완성 (라지베리 파이 시이리얼 통산 단자를 추후 연동 하는 것이 조금더 간편하지 않을까 고민 중)
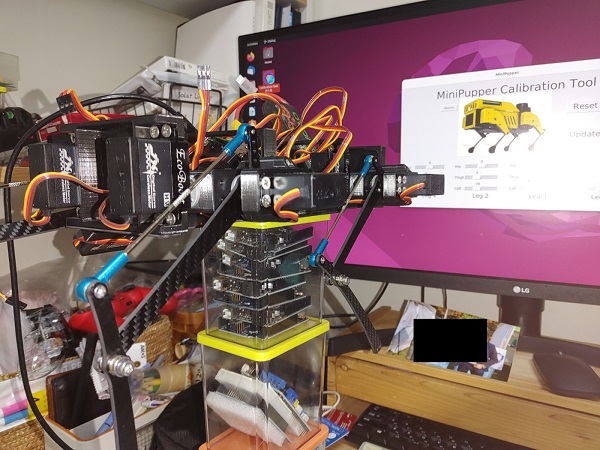
대부분의 4족 로봇 조립 프로젝트들이 위치 Calibration 작업이 초기에 필요한데 Puper도 유사한 서보 모터 우치 조정 작업이 필요하다. 구매한 제품이 Puper라서 관련 Git Hub의 소스 포팅 하여 1주 넘게 실패 하다 제공 받은 IO 보드가 Min Pupper라서 해당 이미지 포팅 후 자세 조정 완료

Pupper의 포팅 문제로 GitHub소스를 일부 살펴 보게 되었으며 Pupper에서 pigpiod라는 데몬 프로그램을 통하여 서보 모터의 PWM을 제어하고 있는데, 이전 라즈베리파이 PWM제어 방식 보다는 조금더 Time관리를 잘해서 안정적으로 나온다는 하는데, 직접 확인 필요한 부분이다.
라즈베리파이4 서보모터 떨림 (jitter),흔들림 (shaking) 문제들이 PWM파형을 안정적으로 만들어 내지 못하여 발생 되는 것으로 의심 된다.
계량된 Mini Pupper에서는 전용 IO보드에 PWM 전용 칩 pca9685이 활용되어 조금더 안정적인 PWM제어를 하는것 같고, 추후 유사한 칩들에 대한 검토를 해볼 예정이다.
Git Hub에서 받은 Pupper소스 포팅 시 라즈베리안에 설치하였으나, Mini Pupper 이미지 교체시 우분트 OS가 변경 되어 판매 업체에 문의 해보았다.
ROS 기본 소스들이 우분트로 제작되어 빠른 사용을 위하여 우분트 OS를 사용하게 되었다고 한다.
제공 받은 운투브 OS를 Ubuntu 22.04.1로 자동 업데이트 후 4족 로봇이 동작 하지 않는 문제를 확인 하였으며, IO에 사용되는 모듈들이 OS의 버전 변경에 따른 추가 제작이 필요하지 않을까 추측 되며, 제공 받은 이미지는 별도의 업데이트 없이 사용해야 정상 동작 된다.
개인 적으로 Linux 프로젝트들은 설정이 반이라서, 그리고 설정이 조금만 바뀌어도 동작하지 않는 등 피곤한 경우가 많아서 성격이 나와서 기피 하는 편이다.
카본을 이용하다 보니 발끝이 날카로워 마루 바닥에 자국이 나는 문제와 다리 부분이 가늘어서 흔들리는 문제가 기구적으로 예상된다. Mini Pupper에서 잘잘한 문제를 해결 하지 않을을까 예상되며, 처음 부터 MIni Pupper를 구매 하거나 Mini Pupper 2 곧 나올 예정이니 기다렸다 다음 버전을 도전 해보는 것이 좋은 선택지가 되지 않을까 판단 된다.




